Isaac Newton (1642-1727) physicien anglais est considéré comme l'esprit le plus brillant et le plus fécond de l'histoire des sciences Idées fondamentales en math, optique, mécanique, dynamique des fluides. Ces trois lois sont publiées dans l'ouvrage "principes de math et philo " 1976.
Les systèmes mécaniques. Forces. Mouvements
1. Qu'est-ce qu'un système mécanique ?
Un système mécanique est un objet ou un ensemble d'objets considérés du point de vue de leur mouvement et des forces qu'ils subissent.
Dans le cas d'un parachutiste, le système étudié peut être le parachutiste ou l'ensemble parachute+parachutiste.
2. Le bilan des forces
On appelle force extérieure une force exercée sur le système étudié par un objet n'appartenant pas au système. On appelle force intérieur une force s'exerçant entre deux parties d'un même système.
Toujours dans l'exemple du parachutiste, les forces extérieures sont le poids et les frottements de l'air. les forces intérieurs sont l'interaction entre le parachutiste et le parachute pour le système parachute+parachutiste.
I] Description d'un mouvement
1. Repérage dans l'espace
Le mouvement d'un corps ne peut être étudié qu'à partir d'un solide de référence que l'on appelle le référentiel.
Un corps peut être en mouvement ou au repos selon le référentiel choisi. Il faut encore situer l'objet par rapport au référentiel, ce qui impose le choix d'un repère.
Pour repérer la position d'un point M dans l'espace, il faut choisir un repère. Dans un repère orthonormé (O, ,
, ,
, ). M et repéré par ses coordonnées cartésiennes (x,y,z) :
). M et repéré par ses coordonnées cartésiennes (x,y,z) :  = x + y+ z.
= x + y+ z.
,,). M et repéré par ses coordonnées cartésiennes (x,y,z) : = x + y+ z.M étant en mouvement, le vecteur varie au cours du temps : x,y,et z sont des fonctions du temps.
varie au cours du temps : x,y,et z sont des fonctions du temps.Il existe une infinité de référentiels, les trois plus courants sont :
-Le référentiel terrestre : Il est défini par tout objet fixé à la Terre. Ces référentiels sont choisi dans le cas d'études des mouvements sur la Terre.
-Le référentiel géocentrique : Il est constitué du centre de la Terre fixe et le repère est défini selon l'axe de rotation de La Terre et la direction de deux étoiles considérées comme fixe. Ces référentiels sont utilisés dans le cas d' étude des étoiles et des satellites de la terre.
-Le référentiel héliocentrique : Il est constitué du centre du Soleil. Le repère est lui constitué de la perpendiculaire à l'écliptique et les directions de deux étoiles considérées comme fixe.
2. Repérage dans le temps
Pour repérer un instant, on lui attribue une date t. Pour cela il faut déjà avoir choisi une date d'origine et l'unité de temps.
II] Caractéristiques d'un mouvement
Dans un référentiel donné, un point est en mouvement si sa position varie au cours du temps.
1. Trajectoire
La trajectoire représente la ligne formée par toutes les positions du système étudié à des instants différents.
On parlera de trajectoires rectiligne si la trajectoire est une droite (mouvement d'un ascenseur).
On parlera de trajectoires circulaire si la trajectoire est un cercle (mouvement d'un enfant immobile sur un manège, par rapport à l' axe de rotation du manège).
2. vitesse
a. vitesse moyenne
Dans le référentiel d'étude, on appelle vitesse moyenne du système le rapport de la distance parcourut d par la durée du parcours (la durée représentant un intervalle de temps entre deux instants t).
v=d/t
b. Vitesse instantanée
Le compteur de vitesse d'une automobile lui indique une vitesse instantanée, c'est à dire la valeur de la vitesse à un instant donné. On parlera de mouvement uniforme si la valeur de la vitesse ne varie pas : le système étudié parcourt alors des distances égales pendant des durées égales.
c. Vecteur vitesse
Le vecteur vitesse instantanée v (t) d'un point mobile M a pour caractéristiques :
>Une direction : tangente à la trajectoire.
>Un sens : celui du mouvement.
>Une norme : v=lim[Δt->0] Δl/Δt = dl/dt .
>Une origine : le point P considéré
3. Centre d'inertie d'un système
Le centre d'inertie noté G est un point particulier d'un système ; son mouvement est généralement plus simple à récrire que celui de n'importe quel autre point du système.
IV] Première et troisième lois de Newton
1. Première loi de Newton : le principe d'inertie
On utilise un dispositif comprenant une table à coussin d'air et un mobile autoporteur. Lors du déplacement du mobile sur la table, on néglige les forces de frottements. Le centre du mobile autoporteur marque la feuille à des intervalles de temps réguliers.
>expérience
On place un mobile autoporteur sur la table à coussin et on enregistre les positions successives de son centre lorsque le mobile est lancé avec une vitesse initiale.
>observation
En traçant le vecteur vitesse en plusieurs points de l'enregistrement on s 'aperçoit que les vecteurs vitesse ont la même norme, le même sens , la même direction. Ce mouvement est rectiligne uniforme.
>interpretation
bilan des forces : Les forces se compensent.
>expérience
Lançons à présent le mobile autoporteur sur une table a d'aire inclinée.
>observation
En traçant le vecteur vitesse en plusieurs points de l'enregistrement on s 'aperçoit que les vecteurs ont la même direction, le même sens mais les normes augmente au cours du temps.
>interprétation
Bilan des forces : Les forces ne se compensent pas.
Lorsque les forces exercées sur un système se compensent, le système conserve une vitesse constante.
Vous aurions pu faire la remarque pour un système au repos qui garderait sa position au repos.
Nous palerons de système isolé soumis à aucune force, c'est une vue de l'esprit) ou pseudo-isolé (un système dont ses forces se compensent).
Dans un référentiel galiléen si la somme des forces extérieurs qui s'exerce sur un système est nulle sont centre d'inertie a un mouvement rectiligne uniforme. Et réciproquement dans un référentiel galiléen si le centre d'inertie du système a un mouvement rectiligne uniforme alors la somme des forces extérieur est nulle.
Remarque : ce principe s'applique également dans le référentiel géocentrique.
2. Importance du référentiel
Le principe d'inertie n'est applicable que dans certains référentiels que l'on dit galiléens. Un référentiel galiléen est un référentiel dans lequel le principe d'inertie s'applique. Le référentiel terrestre peut être supposé comme galiléen pour des expériences de courte durée devant la période de rotation de la Terre.
3. Troisième loi de Newton : principe des actions réciproques
A et B étant deux corps en interaction, la force F(A/B) exercée par A sur B et la force F(B/A) exercée par B sur A ont même direction, même valeur et de sens opposés.

V] Relation entre somme(Fext) et ΔvG
1. Forces extérieures et vitesse du centre d'inertie
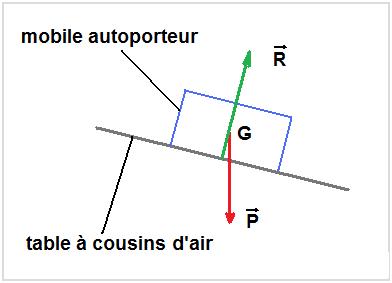
Vous avez vu en classe de première que lorsqu'un système est soumis à un ensemble de forces extérieures de somme non nulle, le vecteur vitesse  de son centre d'inertie varie en direction, en sens et en valeur. (chute libre mouvement parabolique).
de son centre d'inertie varie en direction, en sens et en valeur. (chute libre mouvement parabolique).
de son centre d'inertie varie en direction, en sens et en valeur. (chute libre mouvement parabolique).Le vecteur  variation du vecteur entre deux dates voisines a même direction et même sens que le vecteur
variation du vecteur entre deux dates voisines a même direction et même sens que le vecteur 
variation du vecteur entre deux dates voisines a même direction et même sens que le vecteur 2. Etude expérimentale de la relation entre et
et a. Influence de la durée de l'actions 
On étudie un système mobile autoporteur pouvant glisser sans frottement sur une table à coussin d'air. Il est tiré par un fil qui exerce sur lui une force constante . En étudiant le mouvement du centre d'inertie du système et en traçant la variation de en fonction de la variation de temps, on obtient une droite passant par l'origine donc la valeur du vecteur entre deux dates est proportionnelle à la durée pendant laquelle la force agit.
. En étudiant le mouvement du centre d'inertie du système et en traçant la variation de en fonction de la variation de temps, on obtient une droite passant par l'origine donc la valeur du vecteur entre deux dates est proportionnelle à la durée pendant laquelle la force agit. b. Influence de la valeur de la force
Pour différentes forces on étudie le mouvement du centre d'inertie d'un mobile autoporteur et on trace la variation de en fonction de la force .
on étudie le mouvement du centre d'inertie d'un mobile autoporteur et on trace la variation de en fonction de la force .La représentation est une droite passant par l'origine. La valeur du vecteur pendant une durée donnée est proportionnelle à la valeur de la force .
pendant une durée donnée est proportionnelle à la valeur de la force . c. Influence de la masse du mobile
Pour différentes masses de mobile on étudie la variation du vecteur en fonction de la masse. La représentation graphique nous indique que la variation du vecteur est proportionnelle à l' inverse de la masse M du mobile.
en fonction de la masse. La représentation graphique nous indique que la variation du vecteur est proportionnelle à l' inverse de la masse M du mobile.VI] Le vecteur accélération
1. Définition
Le cours nous a montré l'importance du vecteur /Δt. Ce vecteur est le taux de variation du vecteur .
/Δt. Ce vecteur est le taux de variation du vecteur .On appel vecteur accélération de G à la date t le vecteur :
 =/Δt=lim[Δt->0] /Δt=dvG/dt
=/Δt=lim[Δt->0] /Δt=dvG/dt 2. Le vecteur accélération et l’évolution du vecteur vitesse.
Le vecteur accélération est toujours vers l'intérieur de la courbure de la trajectoire.
Il est parallèle à la trajectoire si le mouvement est rectiligne.
Si la valeur de la vitesse augmente, le vecteur vitesse et la projection de sur la tangente sont dans le même sens, le mouvement est accéléré.
sur la tangente sont dans le même sens, le mouvement est accéléré.Si la valeur de la vitesse diminue, le vecteur vitesse et la projection de sur la tangente sont de sens opposé, le mouvement est ralenti.
sur la tangente sont de sens opposé, le mouvement est ralenti.Si le mouvement est rectiligne uniforme est nul.
est nul.VII] Deuxième loi de Newton
Dans un référentiel galiléen la somme vectorielle des forces extérieures appliquées à un système mécanique est égal au produit de la masse du système par le vecteur accélération de son centre d'inertie :