I] Généralités
Les transmissions peuvent avoir comme fonction de:
- garder la même vitesse.
- changer la direction ou le sens du mouvement.
- réduire la vitesse et augmenter le couple.
- transformer le mouvement.
Réversibilité
Un système est dit réversible si le récepteur peut devenir moteur.
Exemple : une engrenage est réversible, un excentrique ne l'est pas.
Diagramme de Puissance dans un système.
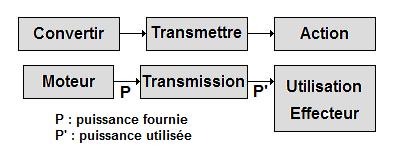
Pour le mécanicien, un moteur est un arbre sur un bâti, le moteur génére un couple.
Quelques formules sur la puissance:
P=T/t avec P la puissance (Watt), T le travail (Joule), t le temps (seconde) .
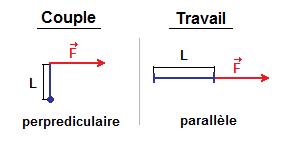
Dans le cas d'un mouvement rectiligne le travail s'écrit : T=Fxl avec F la force (Newton), l la longueur (mètre) et T le travail (Joule).
Dans le cas d'un mouvement circulaire le travaile est un couple qui s'écrit: C=Fxl avec C le couple (N.m) F la force (N) et l la longueur (m).
Rendement d'un systeme.
Un mécanisme dont la puissance en sortie égalerait la puissance en entrée serait idéal. Il n'y aurait pas de frottement dans le système. Toute la puissance serait intégralement restituer en sortie.
Dans tous les cas: P'=η.P ce qui s'écrit: Psortie/Pentre= η
η (nu) rendement est le rendement du système, il est toujours inferieur à 1. Car on ne peut pas crée de la puissance.
II] Transformation d’un mouvement
1) transformation d'une translation en translation
Quand on veut transformer une translation en translation on utilise des accouplements rigides. Le moteur est souvent un vérin.
2) transformation d’une rotation en rotation
Ce qui détermine la transmission est la position relative des axes.
Si les axes sont coaxiaux, on utilise des accouplements :
– rigides (manchon).
- élastiques.
ou des accouplements spéciaux:
– coupleurs.
- enrayages.
- freins.
Tout ces derniers sont des accouplements non permanent.
Si les axes sont parallèles, on utilise si il sont:
- Proche : roue de friction / engrenage
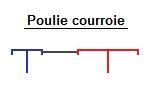
- Eloigné : polie courroie / poulie a chaine
Si les axes sont désaxés, on utilise:
- un cardan.
- une roue de friction.
- un engrenage conique.
- une poulie couroie plate.
Voici les mécanismes utilisant ce type de transmission:
- boite de vitesse (réducteur avec plusieurs rapport de réduction)
- variateur (système qui a une plage possible de rapport de réduction)
- réducteur (a généralement 1 rapport de réduction)
3) transformation d'une translation en rotation
On utilise souvent le systeme bielle manivelle.
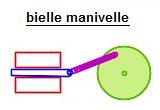
Les 180° ne peuvent être atteint si le piston est moteur si on ne considère pas les aspects dynamiques.
On peux utiliser un systeme pignon crémaillère si les efforts à transmettre sont important. Quand la roue dentée fait 1 tour, la crémaillère avance de 2.Pi.Rp, avec Rp le rayon primitif de la roue dentée.

4) transformation d'une rotation en translation
Les systeme usité sont les suivants:
- Système vis écrou
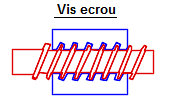
Quand la vis fait un tour l'écrou avance de p (le pas de la vis).
- Pignon crémaillère
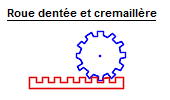
Ici, c'est la roue dentée qui est motrice. C'est la transformation inverse de celle vu précedement.
- Vis crémaillère (très peu utilisé)
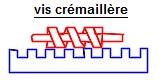
C'est un système qui permet de transmettre la rotation en une transalation dont la direction est parallèle à l'axe de rotation.
- Bielle manivelle (vilebrequin)
Très souvent utilisé pour obtenir une translation facilement.
- Excentrique came poussoir
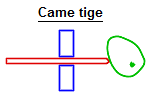
Ce système est difficile à mettre en place mais on le trouve au niveau des soupapes d'admission dans les moteur à essence ou dans certain mecanisme de direction assisté.
III] Calcul des transmissions
Puissance en entrée:
Electrique: P=U.I , avec la puissance P en watt, U en Volt et I en Ampere
Fluidique: P=PrxD , avec P en watt, Pr la pression en Pa, et D le diametre en m^3/s
P=F/SxV/t=FxL/t , avec F la force en Newton, V le volume (m^3), t le temps (s), L la longueur en metre.
Puissance en sortie:
Mouvement de translation: P=F.V , avec P en Watt, F en Newton et V la vitesse en m/s
Mouvement de rotation: P=c.ω , avec P en Watt, C le couple en N.m, et ω la vitesse de rotation en rad/s.
Relation entre la puissance en entré et la puissance en sortie:
Ps= η.Pe avec nu le rendement.
-> Transmission par adhérence (perte, glissement patinage)
η agit sur la vitesse et le couple
-> Transmission par obstacle
η agit sur le couple ωS/ωE=constante
Application dans la mécaniqe.
On calcule dans l’hypothèse du non glissement. Donc VS=VE
Rotation –> rotation
- poulie courroie
ωS/ωE=DE/DS D diamètre de la poulie
Le diamètre a prendre est le diamètre moyen.
- engrenage
R= ωS/ωE=Dpmenante/Dpmené=(Ze/Zs) avec Dp le diametre primitif.
R rapport d’entrainement (de réduction)
-roue et vis sans fin
Zvis=nombre de filet( souvent égale à un) R=1/Zvis
Rotation –> translation
- vis écrou
V=N.pas pas= pas de la vis en m
N= ω/(2PI) N fréquence de rotation tour/s
- pignon crémaillère
N= ω.Rp avec Rp le rayon primitif et N vitesse de la crémaillère m/s
L=Z.pas pas = pas de la crémaillère ou du pignon
Z nombre de dent du pignon
L longueur de déplacement de la crémaillère mm lors d’un tour du pignon
