I] Les symboles normalisé pour les shémas cinématiques.
II] Généralité.
III] La liaison planne, lineaire rectiligne et glissiere.
IV] La liaison pivot guidage en rotation.
V] La liaison complete.
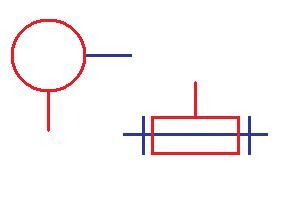
Symbole des liaisons mécaniques:
| Nom de la liaison | Translations | Rotations | Degrés de liberté | Représentations planes | Représentation en perspective | Exemple |
| Fixe ou encastrement | 0 | 0 | 0 | 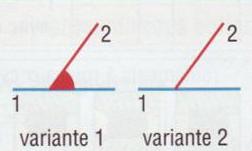 |
 |
 |
| Pivot | 0 | 1 | 1 | 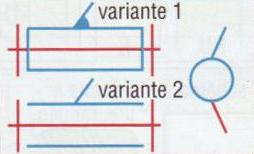 |
 |
 |
| Glissiére | 1 | 0 | 1 | 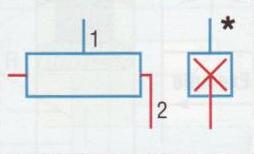 |
 |
 |
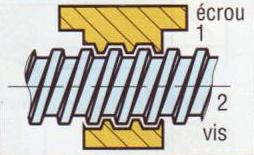
| Hélicoïdale | 1 | 1 | 1 | 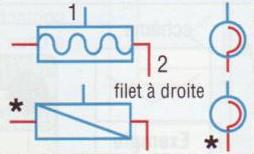 |
 |
 |
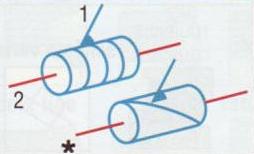
| Pivot glissant | 1 | 1 | 2 | 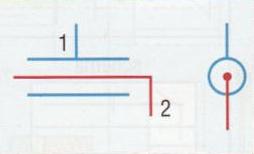 |
 |
 |
| Sphérique ou rotule à doigt | 0 | 2 | 2 | 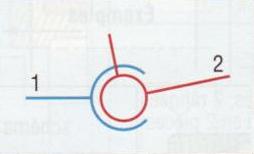 |
 |
 |
| Rotule | 0 | 3 | 3 | 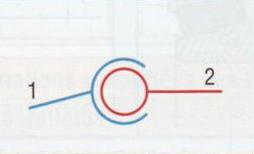 |
 |
 |
| Appui plan | 2 | 1 | 3 | 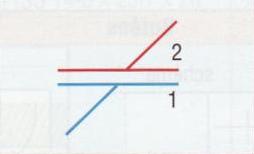 |
 |
 |
| Linéaire rectiligne | 2 | 2 | 4 | 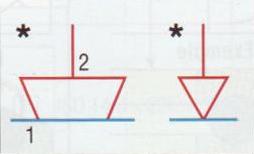 |
 |
 |
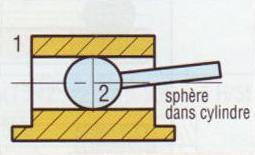
| Sphère cylindre ou linéaire annulaire | 1 | 3 | 4 | 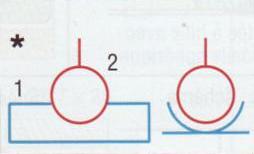 |
 |
 |
| Ponctuelle ou sphere-plan | 2 | 3 | 5 | 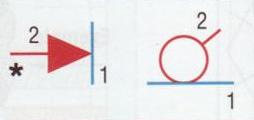 |
 |
 |
Deux partie de mécanisme pouvant se déplacer l’une par rapport à l’autre sont dites en liaison, elles sont en contacte par l’intermédiaire de surfaces.
La nature de mouvement dépend des surfaces de contactes. On les nomme :
-surface de guidage.
-surface fonctionnel.
-surface de liaison.
On a pris l’habitude de distinguer 2 types de surface de guidage :
-surface de mise en position (MiP)
-surface de maintient en position (MaP)
Une surface peut être considéré comme un ligne ou même un point.
Il faut tenir compte du rapport entre l’étendu de la surface et la dimension de mécanisme.
Les liaisons sont défini par la nature des mouvements.
Tout mouvement est décomposable en SIX mouvement élémentaire : 3 translations et 3 rotations en x,y et z.
III]La liaison plane, linéaire rectiligne et glissière
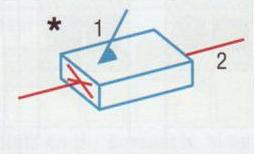
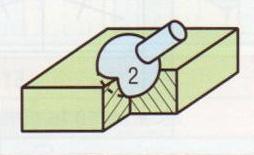
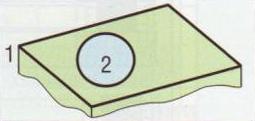
1) la liaison plane
Le contact est un plan.
| Mouvement | Translation | Rotation | ||||
| Axe | Tx | Ty | Tz | Rx | Ry | Rz |
| Possibilité | 1 | 0 | 1 | 0 | 1 | 0 |
Pour Ty il y a cessation de contact si la pièce monte en y donc il n’y aurait plus de liaison donc la translation en y est impossible. Pour Rx et Rz la rotation selon ces axes implique le passage dans la matière : impossible.
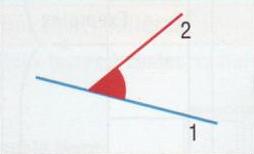
Schéma cinématique : liaison appui plan.
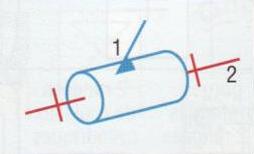
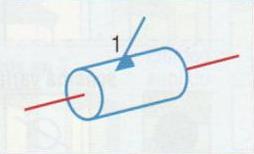
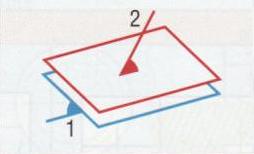
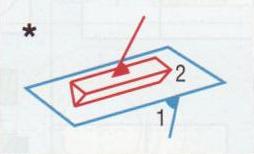
2) la liaison linéaire rectiligne
Le contact est une ligne.
Dés que l’on a un rapport de 10 on peut dire qu’on a affaire à une ligne :
Mouvement
Translation
Rotation
Axe
Tx
Ty
Tz
Rx
Ry
Rz
Possibilité
1
0
1
0
1
1
L’amplitude de mouvement est la longueur du mouvement, c’est la course.
Rz est valable même pour un angle de 10° d’amplitude.
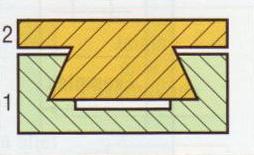
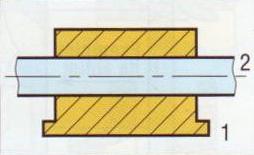
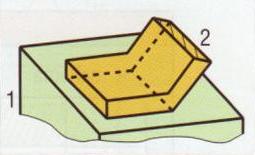
3) La liaison glissière
Le contact est deux surfaces planes perpendiculaire, ou quatre surface planes. Parallelle et perpendiculaire deux à deux.
Mouvement
Translation
Rotation
Axe
Tx
Ty
Tz
Rx
Ry
Rz
Possibilité
0
0
1
0
0
0
La liaison est dite parfaite quand la translation en z n’est pas freiné par des frottements.
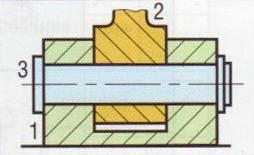
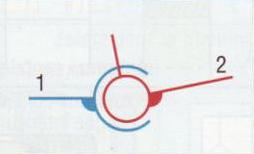
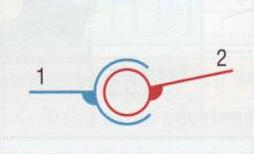
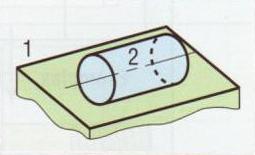
IV] La liaison pivot, guidage en rotation
1) schéma cinématique
Le sous ensemble contenue se nomme l’axe ou l’arbre (bleu).
Le sous ensemble contenant se nomme le moyeu, ou l’alésage ou le palier (rouge).
Dans une liaison pivot il y a généralement une pièce fixe et une pièce mobile. On s’aperçois qu’indifféremment la pièce fixe est l’arbre ou l’alésage. Les noms ne permettant pas de différencier la pièce fixe de la pièce mobile.
2) surfaces fonctionnelle.
Le mouvement de rotation définit au axe. Cette axe permet d’imaginer un cylindre et a partir de ce cylindre on définit les 3 directions.
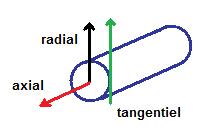
Seul les efforts tangentielle font tourner la pièce. Les efforts radiaux et axiales sont nuisible se sont des mouvement à éliminer.
Le couple arbre, alésage et en contacte par :
- des plans ( éliminent ou limitent les mouvement axiaux)
- un cylindre (éliminent ou limitent les mouvements radiaux).
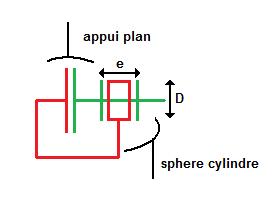
On classe les réalisations en deux familles.
-centrage long et butée axiale : L > 1,5D.
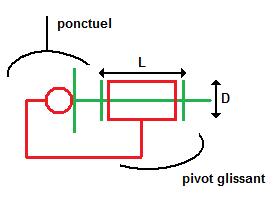
-centrage court et plan : l < 0,5D.
1) généralités
Une liaison est :
-complète (encastrement, fixe, forme un sous ensemble cinématiquement lié).
-partielle (toutes liaison laissant un peu ou plusieurs degrés de liberté).
La nécessité des liaisons complète n’est pas évidente : pourquoi ne pas plutôt réalisé une seul pièce dés le début.
Pour :
- la diminution du nombre de surfaces de liaison.
- diminution du nombre de pièce.
- augmentation de la rigidité des sous ensembles.
Contre :
- l’impossibilité de fabriquer le sous ensemble en une pièce.
- l’impossibilité de monter les autres sous ensemble.
- les difficulté de manipulation, transport, etc.…
- différentes parties des sous ensemble sont constitué de matériaux différents.
- nécessité de réglage.
- nécessité de maintenance (remplacement de pièce usée réglage après usure).
2) qualification des liaisons fixes.
- Par obstacle/par adhérence
Par obstacle, le mouvement est interdit par le contact entre les deux surfaces normales à la directions du mouvement (épaulement).
Les liaisons par obstacle doivent être complète.
Par adhérence, c’est le frottement qui empêche le mouvement.
- direct/indirect
Une liaison est directe si seules les deux pièce à assembler sont présentes. C’est la solution idéale. La pratique montre que l’utilisation de pièce complémentaire (liaison indirect) s’avère indispensable et plus économique.
- démontable/permanentes (non démontable).
Permanant sous entend que le démontage se fait en détruisant une pièce (rivet).
- rigide/élastique
La liaison est rigide si le sous-ensemble est indéformable. L’utilisation de pièces intermédiaire en caoutchouc ou de ressort sont les cas les plus fréquent de la liaison élastique.
3) maintient en position directe
C’est la solution la plus simple et la plus économique.
Le maintient en position direct a recourt à l’une des solutions suivantes :
- emmanchement forcé, coincement, arc-boutement.
- sertissage, agrafage, rivetage.
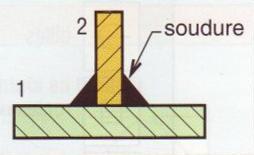
- collage, soudure, brasure.
- surmoulage.
- clipsage, emboitage.
4) maintient en position indirecte
C’est la solution la plus répandu.
Un système est rajouté pour assurer la contacte entre les surfaces.
Les principales famille sont :
>les éléments filetés
L’utilisation d’éléments fileté présente des avantages :
- montage, démontage facile.
- normalisation, interchangeabilité.
- réglage facile.
- grande variété de formes et de dimensions.
Et des inconvénients :
- risque de démontage involontaire (vibration).
- usinage couteux.
- automatisation du montage couteux.
Les principaux système sont les vis, les écrous les goujons.
>les éléments non fileté
goupilles : on utilise des goupilles comme les « clous à métaux ».
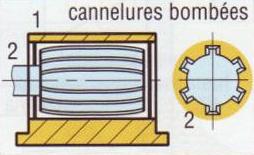
clavettes : l’utilisation des clavette est pratiquement réservé à la liaison en rotation d’un axe sur un alésage (MiP) l’usinage des clavettes nécessite des usinage important. On peut les remplacer par des cannelure ou denture.
Anneau élastique : leur usage est réservé à la réalisation d’épaulement sur les surface de révolution.
Rivet les rivets donnent les liaisons indémontable.
Toutefois en détruisant les rivets par perçage il est possible de récupère la pièce principale.
